Era modernisasi ikut berimbas terhadap modernisasi alat baik di industri kecil maupun di industri besar. Peralatan di sebuah industri yang dulunya digerakkan manual oleh manusia kini mulai terotomatisasi yakni dikendalikan secara otomatis oleh mesin itu sendiri. Proses otomatisasi mesin dikenal dengan istilah sistem kontrol atau ada juga yang menyebut sistem pengendalian. Pentinganya mempelajari sistem pengendalian ini erat kaitannya dengan mengefisiensikan dan mengoptimalkan kerja mesin agar mampu kita atur sesuai dengan apa yang kita harapkan
Secara teori apa perbedaan antara sistem pengendalian manual dengan sistem pengendalian otomatis?
Sistem adalah kombinasi dari beberapa komponen yang bekerja bersama- sama dan melakukan suatu sasaran tertentu, sedangkan pengendalian diartikan sebagai mengekang dan menguasai. Jadi sistem pengendali proses adalah sistem pengendalian suatu parameter dari berbagai macam proses.
Sistem pengendalian proses terbagi menjadi dua yaitu sistem pengendalian manual dan sistem pengendalian otomatis.
1. Sistem Pengendalian Manual adalah sistem pengendalian dengan subyek adalah makhluk hidup, contoh oleh manusia. Biasanya sistem ini dipakai pada beberapa proses-proses yang tidak banyak mengalami perubahan beban ( load ) atau pada proses yang tidak kritis.
2. Sistem Pengendalian Otomatis adalah sistem pengendalian dimana subyek digantikan oleh suatu alat yang disebut controller. Dimana tugas untuk membuka dan menutup valve tidak lagi dikerjakan oleh operator, tetapi atas perintah controller. (Gunterus, 1994)
 |
| Gb. 2. Sistem Pengendalian otomatis |
 |
| Gb.1. Sistem pengendalian manual |
Dari gambar diatas terlihat bahwa contoh sistem pengendalian manual salah satunya adalah proses merebus botol dengan panci panas yang dikasih air. Proses merebus botol ini biasanya dilakukan oleh ibu-ibu untuk mensterilkan botol. Biasanya proses perebusan dimulai dengan memanaskan air sampa mendidih, kemusian botol2 dimasukkan ke panci sampai sekitar 5- 10 menit, setelah selesai maka kita harus mematikan kompor gas secara manual. Sedangkan gambar 2 menunjukkan contoh sistem pengendalian otomatis pada proses sterilisasi botol. Gambar 2 menunjukkan proses sterilisasi botol dilakukan dengan alat sterilizer, dimana kita tinggal memasukkan botol ke alat kemudian kita putar atau tekan sistem kontrol temperatur pada alat tersebut dan jika proses sterilisasi sudah selesai maka alat akan otomatis mati sendiri, sehingga tidak perlu ditunggu dan dimatikan secara manual.
Nah dua kasus tersebut merupakan salah satu contoh dari perbedaan sistem pengendalian manual dan sistem pengendalian otomatis. Dimana perbedaannya terdapat pada adanya suatu alat kontrol yang menggantikan kerja subjek manusia. Jika pada kasus ini maka alat kontrol pada alat sterilisasi adalah alat kontrol temperatur.
Bagaimana proses kerja sistem pengendalian otomatis secara fisika dan elektronika?
Semua analisa sistem pengendalian selalu dimulai dengan menampilkan diagram kotak sistem. Didalam diagram kotak sistem pengendalian otomatis, akan selalu ada komponen-komponen pokok seperti elemen proses, elemen pengukuran (sensing element dan transmitter) , elemen controller (control unit), dan final control element (atau control valve).
Diagram kotak sistem pengendalian otomatis adalah sebagai berikut :
 |
| Gambar 3. Diagram kotak sistem pengendalian otomatis (Gunterus, 1994) |
Pada gambar 3, bagian controller mempunyai summing junction dengan tanda positif-negatif (+/-). Di titik inilah langkah membandingkan dilakukan mengurangi besaran set point dengan sinyal measurement variable. Hasilnya adalah sinyal yang disebut error.
Untuk tanda (-) pada summing junction sistem pengendalian otomatis disebut sistem negative feedback., jika tanda pada summing junction (+) maka sistem pengendalian otomatis disebut positif feedback
Beberapa keterangan mengenai elemen-elemen sistem pengendalian otomatis dari diagram kotak pada gambar 1.1 sebagai berikut :
Proses (Process) adalah tatanan peralatan yang mempunyai suatu fungsi tertentu. Input proses dapat bermacam- macam, yang pasti merupakan besaran yang dimanipulasi oleh final control element atau control valveagar variabel yang dimaksud sama dengan set point. Input proses ini juga disebut variabel yang dimanipulasi.
Variabel yang dimanipulasi adalah input dari suatu proses yang dapat dimanipulasi atau diubah-ubah besarnya agar process variable atauvariabel yang dikendalikan besarnya sama dengan set point.
Gangguan adalah besaran lain, selain variabel yang dimanipulasi, yang dapat menyebabkan berubahnya variabel yang dikendalikan. Besaran ini lazim disebut load.
Elemen Pengukur adalah bagian paling ujung suatu sistem pengukuran (measuring system). Contoh elemen pengukur yang banyak dipakai misalnya termocouple atau oriface plate. Bagian ini juga biasa disebut sensor atau primary element.
Transmitter adalah alat yang berfungsi untuk membaca sinyal sensing element, dan mengubahnya menjadi sinyal yang dapat dimengerti olehcontroller.
Transducer adalah unit pengalih sinyal. Kata transmitter, seringkali dirancukan dengan kata transduser. Keduanya memang mempunyai fungsi yang serupa, walaupun tidak sama benar. Transducer lebih bersifat umum, sedangkan transmitter lebih khusus pada pemakaian dalam sistem pengukuran.
Variabel yang dimaksud atau measured variable adalah sinyal yang keluar dari transmitter. Besaran ini merupakan cerminan besarnya sinyal sistem pengukuran.
Set Point adalah besar process variable yang dikehendaki. Sebuah kendaliakan selalu berusaha menyamakan variabel yang dikendalikan dengan set point.
Error adalah selisih antara set point dikurangivariabel yang dimaksud.Error bisa negatif, bisa juga positif. Sebaliknya, bila set point lebih kecil darivariabel yang dimaksud, error menjadi negatif.
Controller adalah elemen yang mengerjakan tiga dari empat tahap langkah pengendalian yang membandingkan set point denganmeasurement variable, menghitung berapa banyak koreksi yang perlu dilakukan, dan mengeluarkan sinyal koreksi sesuai dengan hasil perhitungan tadi. Controller sepenuhnya menggantikan peran manual dalam mengendalikan sebuah proses. Controller merupakan alat pengendali.
Unit Pengendali adalah bagian dari controller yang menghitung besarnya koreksi yang diperlukan. Input control unit adalah error, dan outputnya adalah sinyal yang keluar dari controller (manipulated variable). Unit Pengendali memiliki fungsi transfer yang tergantung pada jenis controller. Output unit pengendali adalah hasil penyelesaian matematik fungsi transfer dengan memasukkan nilai error sebagai input.
Final control element, seperti tercermin dari namanya, adalah bagian akhir dari instrumentasi sistem pengendalian. Bagian ini berfungsi untuk mengubah measurement variable dengan cara memanipulasi besarnyamanipulated variable, berdasarkan perintah controller.
Jika diagram sistem pengendalian ini dikaitkan dengan proses sterilisasi dengan alat sterilizer, maka pada saat kita memasukkan botol kealat dan memutar atau menekan tombol kontrol temperatur dan waktu sterilisasi, maka disini kita melakukan proses setting point pada sistem pengendalian otomatis. Setting point yang kita masukkan ini akan di baca oleh elemen pengukur (sensor suhu/termokopel misalnya) dan dibaca oleh transmitter. Dari transmitter inilah setting point yang kita masukkan dalam hal ini misalkan suhu temperatur dan waktu sterilisasi akan diubah menjadi sinyal listrik dan dikendalikan oleh sistem kontrol pada alat. Jika proses sterilisasi sudah memenuhi suhu dan waktu proses untuk mensterilkan, maka alat kontrol akan memaksa kerja alat sterilisasi berhenti secara otomatis.
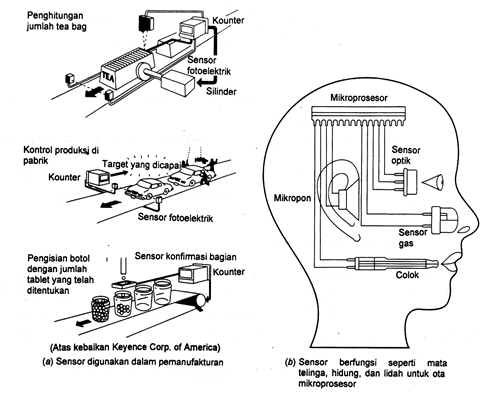
TRANSDUSER DAN SENSOR
Transduser adalah alat yang mengubah energy dari satu bentuk ke bentuk yang lain. Transuder dibagi dua, yaitu transuder input dan transduser output.

Transduser input listrik mengubah energi non listrik, misalnya suara atau sinar menjadi tenaga listrik. Transduser output listrik bekerja pada urutan yang sebaliknya. Transduser tersebut mengubah energi listrik pada bentuk energi non listrik.Sensor adalah alat yang digunakan untuk mendeteksi adanya perubahan lingkungan fisik.
SENSOR PROXIMITY Sensor Proximity adalah alat pendeteksi yang bekerja berdasarkan jarak obyek terhadap sensor. Karakteristik dari sensor ini adalah menditeksi obyek benda dengan jarak yang cukup dekat, berkisar antara 1 mm sampai beberapa centi meter saja sesuai type sensor yang digunakan. Sensor proximity dibedakan menjadi dua :
- Proximity Induktif
- Proximity Kapasitif
Proximity Induktif Berfungsi untuk mendeteksi obyek besi atau metal. Meskipun terhalang oleh benda non-metal, sensor akan tetap dapat mendeteksi selama dalam jarak (nilai) normal sensing atau jangkauannya. Proximity Kapasitif Sensor pembatas yang mendeteksi benda isolator atau selain logam Missal: kertas atau plastic.
SENSOR SINAR
Sensor sinar dibagi menjadi tiga :
- Fotovoltaic
Merupakan Alat sensor sinar yang mengubah energi sinar langsung menjadi energi listrik, dengan adanya penyinaran cahaya akan menyebabkan pergerakan elektron dan menghasilkan tegangan Berfungsi untuk mengubah sinar matahari menjadi arus listrik DC. Tegangan yang dihasilkan sebanding dengan intensitas cahaya yang mengenai permukaan solar cell. Semakin kuat sinar matahari tegangan dan arus listrik Dc yang dihasilkan semakin besar.
- Fotokonduktif
Merupakan Alat sensor sinar yang memberikan perubahan tahanan (resistansi) pada sel-selnya, semakin tinggi intensitas cahaya yang diterima, maka akan semakin kecil pula nilai tahannya.
- Fotolistrik
Merupakan Alat sensor sinar yang berprinsip kerja berdasarkan pantulan karena perubahan posisi/jarak suatu sumber sinar (inframerah atau laser) ataupun target pemantulnya, yang terdiri dari pasangan sumber cahaya dan penerima. Contoh :fingerprint

Teknologi kode batang banyak digunakan di industri, karena penggunaan yang luas dan cepat. Memasukan data jauh lebih cepat dibandingkan metode manual dan sangat akurat. Tersiri dari tiga elemen utama : simbol kode batang, scanner, dan decoder. Simbol kode batang berisi 30 karakter yang disandikan dalam bentuk mesin yang dapat dibaca.

SENSOR HALL-EFFECT
Hall effect sensor merupakan sensor yang digunakan untuk mendeteksi medan magnet. Hall Effect sensor akan menghasilkan sebuah tegangan yang proporsional dengan kekuatan medan magnet yang diterima oleh sensor tersebut. Sensor ini didesain untuk mendeteksi keberadaan dari objek magnetik, biasanya magnet permanen. Biasanya digunakan untuk mensinyalir posisi dari komponen, dan sensor ini memiliki tingkat ketelitian yang tinggi
SENSOR ULTRASONIKSensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah diatas gelombang suara dari 40 KHz hingga 400 KHz. Sensor ini dioperasikan dengan mengirimkan gelombang suara pada taget dan mengukur waktu yang dibutuhkan oleh gelombang untuk memantulkan kembali. Waktu yang dibutuhkan oleh gema untuk kembali ke sensor adalah proporsional terhadap jarak dan tinggi dari objek, karena sura memiliki kecepatan yang tetap.
SENSOR TEKANAN
Sensor Tekanan adalah sensor untuk mengukur tekanan suatu zat. Tekanan (p) adalah satuan fisika untuk menyatakan gaya (F) per satuan luas (A). Satuan tekanan sering digunakan untuk mengukur kekuatan dari suatu cairan atau gas. Sensor tekanan dapat diaplikasikan pada:
- Motor bensin
— Pesawat terbang — Pengukur tekanan ban — ketinggian, pesawat terbang, roket, satelit, balon udara dll
PEMINDAHAN TRANSDUSER
Pengertian William D.C, (1993), mengatakan transduser adalah sebuah alat yang bila digerakan oleh suatu energi di dalam sebuah sistem transmisi, akan menyalurkan energi tersebut dalam bentuk yang sama atau dalam bentuk yang berlainan ke sistem transmisi berikutnya” Transmisi energi ini bisa berupa listrik, mekanik, kimia, optic (radiasi) atau thermal (panas). Pemindahan Transduser yang sering digunakan di industri adalah transvormator diferensial variabel linear ( the Linear Variable Differential Transformer = LVDT) LVDT (Linear Variable Differential Transformer) merupakan salah satu contoh sensor posisi, yang bekerja berdasarkan pada ada tidaknya medan magnet yang terjadi. LVDT terdiri atas 2 bagian yaitu :
- Kumparan (Tansformer)
salah satu komponen penyusun LVDT merupakan kumparan. terdapat 3 kumparan dalam LVDT,yaitu 1 kumparan primer dan 2 kumparan sekunder. kenapa digunakan 2 buah kumparan sekunder adalah agar perbedaan besar induksi yang diterima kedua kumparan sekunder dapat digunakan untuk menentukan seberapa besar perubahan posisi batang inti (magnet).
- CORE (batang inti magnet)
material core atau batang inti ini biasanya berbentuk silinder atau turbular dengan komponen penyusun berupa nickel-iron alloy permalloy. dalam proses produksinya, setelah bentuk dan ukuran dari batang inti ini di atur proses akan memasuki tahap annealing (atau penguatan dengan proses memanasi). Selama proses annealing ini biasanya dilakukan reduksi aliran gas untuk mencegah terjadinya oksidasi. gas yang biasanya digunakan dalam proses annealing ini biasanya hydrogen ataupun gas yang mengandung hidrogen.
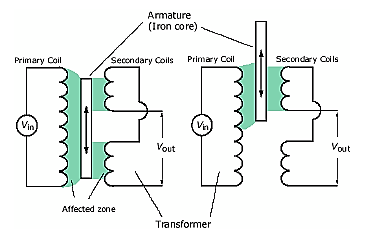
Prinsip Kerja LVDT Secara umum LVDT bekerja karena adanya perbedaanmedan magnet. Medan magnet ini muncul karena adanya gerakan inti magnet yang dimasukkan ke dalam kumparan. Semakin dalam inti magnet dimasukkan ke dalam kumparan maka nilai medan magnet yang di hasilkan akan semakin besar. LVDT bekerja pada frekuensi rendah dan gerakannya linear terhadap masukan. Kelebihan dan Kekurangan LVDT Berikut ini adalah kelebihan serta kekurangan LVDT : Kelebihan
- Padat dan kuat, sehingga dapat digunakan pada peralatan yang berat.
- System operasi tanpa gesekan antara aramature dan transformer sehingga cocok untuk pengujian material.
- Sensitif, sehingga dapat mendeteksi sedikit saja perubahan.
- Mampu menanganai input yang berlebih
- Dapat digunakan pada lingkungan yang bervariasi.
- Output mutlak
Kekurangan
- LVDT baru bekerja jika ada kontak antara armature dan transformer.
- Pengukuran dinamis dibatasi tidak lebih dari 1/10 dari LVDT resonansi frekuensi. Di beberapa kasus, hasilnya lebih dari 2 kHz.
SENSOR SUHU Sensor Suhu adalah komponen yang biasanya digunakan untuk merubah panas menjadi listrik untuk mempermudah dalam menganalisa besarannya. Ada 4 jenis utama sensor suhu yang biasa digunakan : 

- Termokopel
Termokopel merupakan sensor suhu yang terdiri atas sepasang penghantar yang berbeda disambung las atau dileburkan bersama pada satu sisi membentuk penghantar ”hot” atau sambungan pengukuran yang ada ujung ujung bebasnya untuk menghubungkan dengan penghantar ”cold” atau sambungan referensi.
- RTD (Resistance Temperture Detector)
Alat ini fungsinya adalah untuk mengubah suhu menjadi hambatan listrik yang sebanding dengan perubahan suhu. Semakin tinggi suhu, maka hambatan listriknya semakin besar. RTD adalah sensor suhu yang terbuat dari kumparan kawat platinum pada papan pembentuk isolator.
- Thermistor
Thermistor, atau bisa disebut juga dengan Thermal Resistor atau Thermal Sensitive Resistor. Alat ini berfungsi untuk mengubah suhu menjadi hambatan listrik yang berbanding terbalik dengan berubahnya suhu. Semakin tinggi suhu maka semakin kecil hambatan listriknya. Thermistor biasanya terbuat dari bahan oksida logam campuran, kromium, kobalt, tembaga, besi, atau nikel.
- Sensor IC ( Sensor Suhu Rangkaian Terpadu)
fungsinya untuk mengubah suhu menjadi tegangan tertentu yang sesuai dengan perubahan suhu. Alat ini biasanya digunakan pada sistem monitor rumah kaca atau sensor suhu ruang pada laboratorium kimia.
SENSOR KECEPATAN (SENSOR RPM)

Tachometer umumnya menunjuk pada magnet permanen kecil dari generator dc. Ketika generator diputar, generator menghasilkan tegangan dc berbanding lurus dengan kecepatan. Tachometer yang dirangkai dengan motor, umumnya digunakan pada aplikasi pengendali kecepatan motor untuk memberikan tegangan umpan-balik pada pengontrol yang sebanding dengan kecepatan motor.

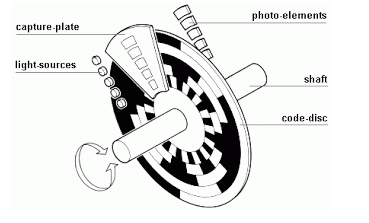
SENSOR PENYANDI (ENCODER SENSORE)
Sensor penyandi digunakan untuk mengubah gerakan linear atau putaran menjadi sinyal digital. Penyandi putaran memonitor gerakan putar dari alat. Ada dua jenis :
- Penyandi tambahan, yang mentransmisikan jumlah tertentu dari pulsa untuk masing-masing putaran alat.
- Penyandi absolut, yang memperlengkapi kode binary tertentu untuk masing-masing posisi sudut alat.
PENGUKURAN ALIRAN
Prinsip kerja dari alat ukur aliran tekanan differensial disebut efek Bernauli : Apabila cairan mengalir, tekanan P1 akan menjadi lebih besar disbanding dengan P2 dan perbedaan tekanan berbanding lurus dengan tekanan. Balon memuai sebanding dengan alilran. Apabila P1 lebih besar disbanding P2 inti pada LVDT akan bergerak kekanan. Apabla aliran terhenti tidak akan ada efek bernauli dan inti akan menjadi ditengah.

PENGKONDISIAN SINYAL
Kondisioner sinyal mengubah sinyal dengan cara yang dikehendaki untuk lebih mempermudah mengukur sinyal atau membuatnya lebih stabil. Amplifikasi(penguatan) diperlukan apabila output sensor terlalu rendah untuk langsung bermanfaat pada pengukuran atau pada sistem pengendali. Atenuasi (pelemahan) digunakan untuk mengurangi tegangan sebelum pengukuran. Pada contoh tertentu sinyal dapat diubah dari analog menjadi digital atau sebaliknya dengan menggunakan konventer A/D (analog ke digital) atau konventer D/A (digital ke analog).

AKUATOR
adalah sebuah peralatan mekanis untuk menggerakkan atau mengontrol sebuah mekanisme atau sistem. Aktuator diaktifkan dengan menggunakan lengan mekanis yang biasanya digerakkan oleh motor listrik, yang dikendalikan oleh media pengontrol otomatis yang terprogram di antaranya mikrokontroler. Aktuator adalah elemen yang mengkonversikan besaran listrik analog menjadi besaran lainnya misalnya kecepatan putaran dan merupakan perangkat elektromagnetik yang menghasilkan daya gerakan sehingga dapat menghasilkan gerakan pada robot. Untuk meningkatkan tenaga mekanik aktuator ini dapat dipasang sistem gearbox. Aktuator dapat melakukan hal tertentu setelah mendapat perintah dari kontroller. Misalnya pada suatu robot pencari cahaya, jika terdapat cahaya, maka sensor akan memberikan informasi pada kontroller yang kemudian akan memerintah pada aktuator untuk bergerak mendekati arah sumber cahaya.
Aktuator dalam perspektif kontrol dapat dikatakan sebagai:
- Aktuator : Pintu kendali ke sistem
- Aktuator : Pengubah sinyal listrik menjadi besaran mekanik
- Batasan aktuator riil: Sinyal kemudi terkesil, saturasi.
Fungsi aktuator adalah sebagai berikut.
- Penghasil gerakan
- Gerakan rotasi dan translasi
- Mayoritas aktuator > motor based
- Aktuator dalam simulasi cenderung dibuat linier
- Aktuator riil cenderung non-linier
Jenis tenaga penggerak pada aktuator
- Aktuator tenaga elektris, biasanya digunakan solenoid, motor arus searah (Mesin DC). Sifat mudah diatur dengan torsi kecil sampai sedang
- Aktuator tenaga hidrolik, torsi yang besar konstruksinya sukar.
- Aktuator tenaga pneumatik, sukar dikendalikan.
- Aktuator lainnya: piezoelectric, magnetic, ultra sound.
Tipe aktuator elektrik adalah sebagai berikut:
- Solenoid.
- Motor stepper.
- Motor DC.
- Brushless DC-motors.
- Motor Induksi.
- Motor Sinkron.
Keunggulan aktuator elektrik adalah sebagai berikut:
- Mudah dalam pengontrolan
- Mulai dari mW sampai MW.
- Berkecepatan tinggi, 1000 – 10.000 rpm.
- Banyak macamnya.
- Akurasi tinggi
- Torsi ideal untuk pergerakan.
- Efisiensi tinggi
No comments:
Post a Comment